

As advanced drone operations scale, stakeholders need greater understanding of ground-based surveillance systems (GBSS) and airspace awareness tools that enable autonomous, BVLOS operations: and the terms that describe their coverage relative to drone operations. Here, an authority from MatrixSpace explains Surveillance vs. Declaration vs. Operational volume. MatrixSpace is re-imagining radar, addressing the following generation of AI-enabled sensing in order that objects could be identified and data collected in real-time.
A Primer: Surveillance vs. Declaration vs. Operational volume for UAS
There’s a typical misconception within the UAS industry when talking about surveillance and operational volumes for UAS operations. The RTCA DO-381A Ground-based Surveillance System (GBSS) Standard provides definitions for these terms:
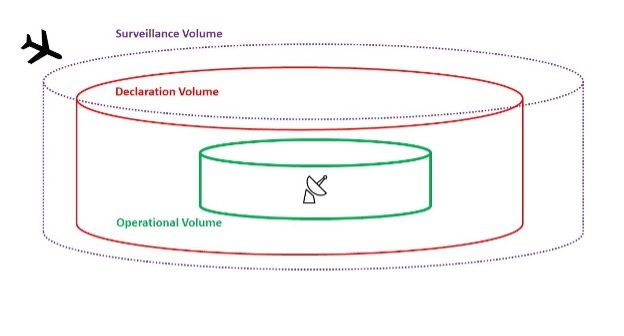
- Surveillance Volume is the 3D volume defined by the world where at the very least one Ground-based Sensor (GBS) has coverage.
- Declaration Volume is the 3D volume contained in the Surveillance Volume where at the very least one sensor meets the track accuracy requirements and might declare the track for air traffic.
- Operational Volume is the 3D volume where the UA relaying on GBSS track data can safely operate inside its performance specifications.
 While these terms sound a little bit confusing, let’s attempt to make them more comprehensible.
While these terms sound a little bit confusing, let’s attempt to make them more comprehensible.
Imagine that an air traffic intruder (big/small plane, helicopter) flies towards the GBSS location. The primary area it’ll hit is Surveillance Volume (SV). SV is an area where a ground-based system can detect “something,” but remains to be not clear if this “something” is an actual intruder or some sort of other object. The system remains to be trying to seek out out if this object is an actual intruder or not. Once the GBSS system passes the factors for track determination, it declares the thing as a track of an air traffic intruder – and the intruder is transitioned from the surveillance volume to the Declaration Volume (DV) (it needs to be noted that different technologies (e.g., RADAR, Electro-Optical, or Acoustic) have different approaches to determining whether the intruder is an object of interest or not. Each technology uses its own algorithms and techniques to define the factors for track establishment).
From this point on, the intruder is within the Declaration Volume. The GBSS has established the track and might transmit it to the opposite functions within the DAA framework, equivalent to Alert or Avoid functions.
The Alert function should now determine if this intruder is a threat to the UAV or not. If the intruder is set to be on the course to breach a UAV Well Clear (WC) Volume (2000ft horizontal ± 100ft vertical), then an avoidance maneuver is initiated (commonly a vertical descent to a secure altitude). While the UAV is executing this, the intruder remains to be flying towards the UAV. Once the UAV reaches a secure altitude, a minimum 2000ft (610m) horizontal buffer needs to be between the UAV and the intruder to be sure that WC volume just isn’t breached.
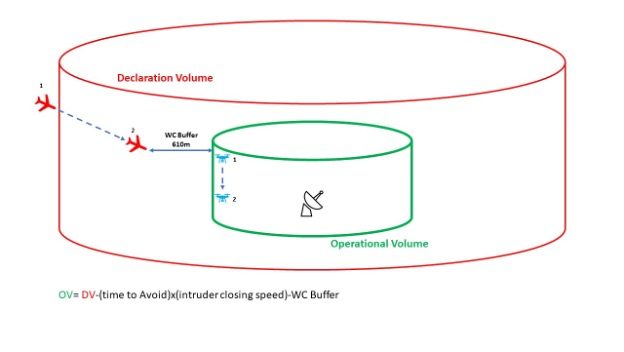
To find out the Operational Volume (OV) across the GBSS, the UAV operator should consider multiple variables equivalent to the Declaration range, average intruder speed, total avoidance maneuver time, and others. Below is an easy example of easy methods to determine operational volume boundaries based on the entire above:
Let’s assume:
- GBSS Declaration Range – 2000 meters
- Average intruder speed – 57m/s (110 kts)
- UAV operational altitude – 100ft AGL
- UAV secure altitude – 50ft
- Time to finish the avoidance maneuver – 4s (50ft descend at 4m/s descend rate)
- Pilot response time – 5s (Per ASTM DAA performance standard, pilot-directed maneuver)
- Total system latencies – 1s
- WC buffer – 2000ft (610m)
To find out the operational volume radius, we must calculate the worst-case scenario, meaning that the UAV is at the sting of the operational volume, and the intruder is flying toward it.
- GBSS detects the intruder on the 2000-meter range.
- The detected track is communicated to the Distant Pilot In Command (RPIC)
- Pilot executes predetermined avoidance maneuver procedure (5s)
- UAV completes avoidance maneuver and reaches the secure altitude(4s)
- Add total system latency (1s)
- Subtract WC buffer 610m.
If we do “Outside In” calculations >>> 2000m – 5sx57m/s – 4sx57m/s – 1sx57m/s – 610m= 820m. Because of this based on the above assumptions, at an 820m radius from the GBSS, the UAV can operate in every single place and have enough time budget to achieve the secure altitude when encountering the intruder in a worst-case scenario. If the UAV is working contained in the 820m radius volume, then it’ll have more time to achieve the secure altitude, due to this fact making the entire operation safer.
The above calculations represent the simplified version of the operational area determination. Actual calculations might bear in mind other variables.
Conclusion
UAS Operational Volume just isn’t a hard and fast value. While the GBSS Surveillance and Declaration ranges are fixed, UAV Operational Volume is generally depending on the UAS operations conops and the characteristics of the UAS systems. Making adjustments to the operational and secure altitude, UAV speeds and other aspects can drastically change the operational area. It’s due to this fact upon the system integrators to find out the precise dimensions of the operational area based on certain locations and circumstances.
Learn more about MatrixSpace’s drone detection solution at https://matrixspace.com/dronedetection/

Read more:






{kind=link}